
|
|
|
Elektrische Servoantriebe müssen Prozessgrößen mit hoher
Genauigkeit und Dynamik bereitstellen. Sie verfügen deshalb über
geschlossene Regelkreise, die ein entsprechendes Führungsverhalten
sicherstellen und vom Anwendungsprozess einwirkende Störgrößen
kompensieren. Die Regelungsfunktionen sind in der Signalelektronik des
Stellgliedes integriert. Sie werden in modernen Geräten fast ausschließlich
digital unter Verwendung von Mikroprozessoren realisiert.
Bevor die regelungstechnischen Details von Servoantrieben behandelt werden,
sei nachfolgend ein kleiner Exkurs in die wichtigsten Grundlagen der Regelungstechnik
gestattet.
Die Regelung von physikalischen Größen ist ein Steuerverfahren, bei dem die zu beeinflussende Größe (Regelgröße) laufend erfasst und mit einem Sollwert (Führungsgröße) verglichen wird. Treten Abweichungen auf, wird eine Stellgröße so verändert, dass die Abweichung minimal wird oder ganz verschwindet.
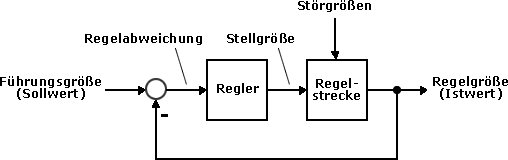
Der Regelkreis besteht aus den Hauptkomponenten Regelstrecke und Regler. Die Regelstrecke ist der zu beeinflussende Anlagenteil. Der Regler ist eine Funktionseinheit, die nach vorgegebenen Algorithmen aus der Regelabweichung die erforderliche Stellgröße zur Verringerung der Regelabweichung berechnet.
Regelabweichungen treten entweder
auf.
Zur Beschreibung von Regelkreisen werden Signalflusspläne verwendet. Sie bestehen aus Signalpfaden und Übertragungsgliedern.
Die Übertragungsglieder wandeln ihre Eingangsgröße nach einer mathematischen Funktion (Übertragungsfunktion) in ihre Ausgangsgröße um. Man unterscheidet
Übertragungsglieder.
Für das grundlegende Verständnis ist meistens die Betrachtung
von linearen, kontinuierlichen Übertragungsgliedern ausreichend.
Theoretisch ist die Anzahl von möglichen Übertragungsgliedern unendlich groß. Praktisch kann man jedoch eine Reihe von Grundgliedern definieren, aus denen sich durch Reihen- und Parallelschaltung komplexere Übertragungsglieder bilden lassen. Die Beschreibung von Regelkreisen wird dadurch stark vereinfacht und übersichtlich. Die nachfolgende Tabelle enthält die wichtigsten linearen, kontinuierlichen Übertragungsglieder.
|
Name
|
Beschreibung
|
Signalverlauf bei sprungförmiger Anregung
|
Parameter
|
Symbol |
| P-Glied | Das Eingangssignal wird proportional verstärkt. | 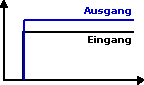 |
Proportional- verstärkung P |
 |
| I-Glied | Das Eingangssignal wird integriert. | 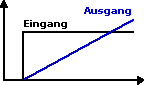 |
Integrations- zeitkonstante Ti |
 |
| D-Glied | Das Eingangssignal wird differenziert. | 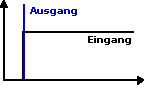 |
Differentiations- zeitkonstante Td |
 |
| PT1-Glied | Das Ausgangssignal nähert sich dem Eingangssignal verzögert an. | 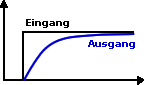 |
Zeitkonstante T1 |  |
| PT2-Glied | Das Ausgangssignal schwingt auf das Eingangssignal ein. | 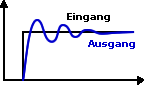 |
Dämpfung D |
 |
Die Beschreibung von Regelkreisen mit Signalflussplänen ist nachfolgend beispielhaft für einen Lageregelkreis dargestellt.
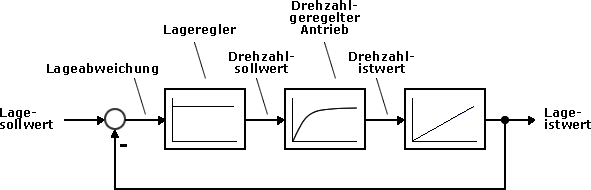
Als Regler kommt ein P-Glied zum Einsatz. Die Regelstrecke bildet ein drehzahlgeregelter Antrieb, der als PT1-Glied modelliert wird. Der Lageregler gibt bei einer vorhandenen Lageabweichung einen Drehzahlsollwert aus, dem der Antrieb verzögert folgt. Aufgrund der Drehbewegung verringert sich die Lageabweichung. Ist die Sollposition erreicht, wird die Lageabweichung zu 0 und der Lageregler gibt einen Drehzahlsollwert von 0 aus. Der Antrieb kommt zum Stillstand.
Praktisch treten in Regelkreisen oft Begrenzungen auf. Insbesondere die Stellgrößen stehen nicht in beliebiger Größe zur Verfügung. Die Begrenzung von Signalen wird durch ein nichtlineares Begrenzungsglied dargestellt.
|
Name
|
Beschreibung
|
Parameter
|
Symbol |
| Begrenzungsglied | Das Eingangssignal wird, so lange es den Maximalwert nicht über- und den Minimalwert nicht unterschreitet, unverändert ausgegeben. Anderenfalls wird entweder der Maximalwert oder der Minimalwert ausgegeben. |
Maximalwert |
 |
|
|
|
|
Anzeigen
|
w-tech, Neumannstr. 29, D-90763 Fürth, Tel. +49 (0)911 73 99
715, Fax +49 (0)911 73 99 716, info@w-tech.de
Impressum