Warum soll bei Servoantrieben das Lastträgheitsmoment
nicht größer als das 10-fache Motorträgheitsmoment
sein?
Antwort der Redaktion
Das Lastträgheitsmoment ist über die Motorwelle mit dem
Motorträgheitsmoment verbunden. Die Motorwelle ist kein
idealer Übertrager sondern stellt bei genauerer Betrachtung
ein Feder-Dämpfer-System dar, das bei Übertragung eines
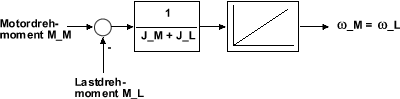
Drehmomentes einer Torsion ausgesetzt ist. Die starre Mechanik,
die im Allgemeinen im Signalflussplan des geregelten Servoantriebes
verwendet wird, muss durch eine schwingungsfähige Mechanik
ersetzt werden.
|
|
Starre Mechanik |
|
|
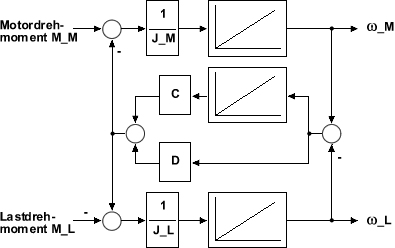
Schwingungsfähige Mechanik |
Als neue Parameter treten jetzt die Federkonstante C und
die Dämpfung D auf. Die Dämpfung D ist bei Wellen aus Stahl
recht klein und kann zur Vereinfachung der Betrachtungen
auch auf 0 gesetzt werden.
Für die Bestimmung der Federkonstante soll ein konkreter
Servomotor mit folgenden Daten betrachtet werden:
| Nennmoment |
M_M |
5,3 Nm |
| Nenndrehzahl |
n_M |
2000 1/min |
| Motorträgheitsmoment |
J_M |
0,00077 kgm² |
| Radius der Motorwelle |
r_M |
0,012 m |
| Längenanteil der Motorwelle, der sich durch Torsion
verformen kann |
l_M |
0,05 m |
| Schubmodul für Stahl (Material der Welle) |
G |
80 000 MN/m² |
| Die Federkonstante C ergibt sich dann zu: |
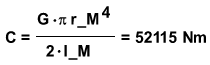 |
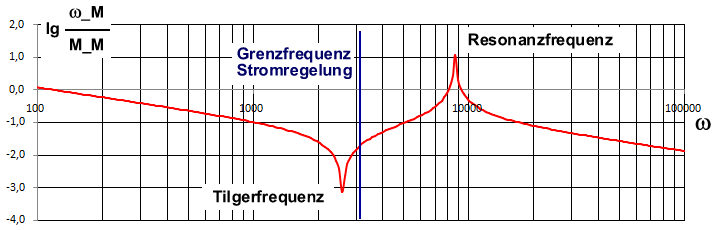
Wählt man das Lastträgheitsmoment gleich dem
Motorträgheitsmoment und ermittelt man für diese Daten
den Amplitudengang der Motordrehzahl als Funktion des Motordrehmoments,
ergibt sich der nachfolgend dargestellte Verlauf.
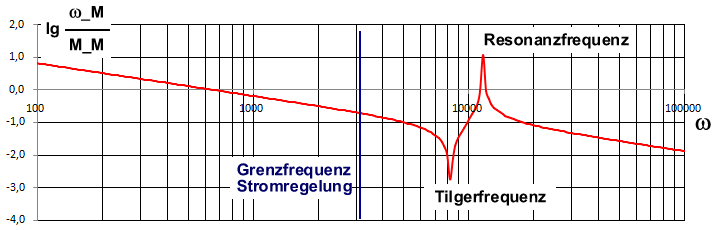
Die Motordrehzahl weist eine Tilgerfrequenz von 8,2 kHz
und eine Resonanzfrequenz von 11,6 kHz auf.
Um die Auswirkungen dieser Frequenzen zu bewerten, muss
der Betriebsbereich des Servoantriebes betrachtet werden.
Stromregler in Servoantrieben haben eine typische Anregelzeit
T_an von 1 ms. Die maximale Kreisfrequenz, die der Stromregler
im Motordrehmoment erzeugen kann, liegt näherungsweise bei
1/T_an = 3,1 kHz. Tilgerfrequenz und Resonanzfrequenz liegen
also deutlich oberhalb des Arbeitsbereiches des Stromreglers
und werden damit nicht angeregt. Die Anregelzeit eines nach
dem symmetrischen Optimum eingestellten Drehzahlreglers
liegt bei ca. 3 ms. Seine Grenzfrequenz beträgt dann
ca. 1 kHz.
Diese Situation verändert sich jedoch, wenn die Lastträgheit
auf den 10-fachen Wert des Motorträgheitsmomentes erhöht
wird.
Die Motordrehzahl weist jetzt eine Tilgerfrequenz von 2,6
kHz und eine Resonanzfrequenz von 8,6 Kz auf. Beide Frequenzen
wandern nach links und verschlechtern damit die Eigenschaften
des Servoantriebes:
- Die Wahrscheinlichkeit, dass der Stromregler die Resonanzfrequenz
anregt, steigt. Es ist mit Schwingungen in der Motordrehzahl
zu rechnen.
- Die Tilgerfrequenz nähert sich dem Arbeitsbereich des
Drehzahlreglers und begrenzt seine Dynamik.
Bei einer weiteren Erhöhung des Lastträgheitsmomentes wandern
die Tilger- und Resonanzfrequenz noch weiter nach links
und die negativen Auswirkungen auf das Regelverhalten des
Servoantriebes steigen. Um diese zu vermeiden, muss die
maximale Kreisfrequenz des Stromreglers durch veränderter
Reglerparameter oder zusätzliche Filter im Stromsollwert
abgesenkt werden. Damit sinkt allerdings die erreichbare
Dynamik des Servoantriebes - aber insbesondere die Schwingungen
in der Motordrehzahl können verringert werden.
Es liegt in der Verantwortung des Anwenders zu entscheiden,
ob die notwendige Absenkung der Dynamik bei hohen Lastträgheitsmomenten
akzeptabel ist. Ist sie nicht akzeptabel, muss ein Servomotor
mit einer dickeren Motorwelle verwendet werden. Eine dickere
Motorwelle erhöht die Federkonstante und verschiebt die
Tilger- und Resonanzfrequenz wieder nach rechts. Da es unüblich
ist, Servomotoren mit variablem Wellendurchmesser anzubieten,
führt die Auswahl eines Motors mit einem größeren Wellendurchmesser
in der Regel zu einem Motor mit einem höheren Motorträgheitsmoment.
Damit nähert sich das Motorträgheitsmoment wieder dem Lastträgheitsmoment
an. Aus diesen Überlegungen heraus hat sich für die praktische
Auslegung von Servomotoren die empirische Regel herausgebildet,
dass das Lastträgheitsmoment nicht größer sein sollte als
das 10-fache Motorträgheitsmoment.
|