
|
|
|
Die meisten elektrischen Antriebe unterliegen einer zeitlich veränderlichen
Belastung. Die auftretenden Verluste sind damit ebenfalls zeitlich veränderlich.
Die Erwärmung des Motors erfolgt deshalb nicht kontinuierlich sondern
besteht aus einer Abfolge von Erwärmungs- und Abkühlungsphasen.
Es stellt sich ein anwendungsspezifisches Temperaturspiel ein.
Durch geeignete Auslegung des Motors ist nun sicherzustellen, dass innerhalb
des Temperaturspieles die maximal zulässige Motortemperatur nicht
überschritten wird. Aufgrund der Vielzahl unterschiedlicher Anwendungen
gestaltet sich diese Aufgabe in der Praxis schwierig. Grundsätzlich
bieten sich zwei Lösungsansätze an:
Da der letzte Ansatz nur in Sonderfällen in Betracht kommt, erfolgt die Auslegung überwiegend durch Rückführung der konkreten Belastung auf eine Nennbetriebsart.
Im allgemeinen stellen die Motorlieferanten in ihren Datenblättern folgende Kennlinien zur Verfügung:
Diese Kennlinien beziehen sich entweder auf die Leistung oder das Drehmoment
des Motors. Über die Formel:
| Leistung = Drehmoment * Winkelgeschwindigkeit |
 lassen
sie die Diagramme ineinander überführen.
lassen
sie die Diagramme ineinander überführen.
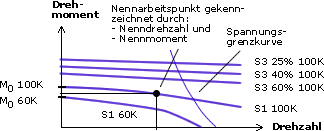
Das nebenstehende Bild zeigt beispielhaft ein übliches Drehmoment-Drehzahl-Diagramm
für die thermische Auslegung von Servomotoren. Angegeben sind die
(thermisch) zulässigen Drehmomente als Funktion der Drehzahl in Abhängigkeit
von der Betriebsart und der gewünschten Übertemperatur bzw.
Wärmeklasse.
Wie zu erkennen ist, sinken bei Servomotoren die zulässigen Drehmomente mit steigender Drehzahl ab. So ist im Stillstand ein höheres Drehmoment (Stillstandsmoment M0) als bei Drehzahlen größer Null oder im Nennpunkt (Nennmoment Mnenn) zulässig. Die Ursache dafür liegt in den Ummagnetisierungsverlusten, die mit steigender Frequenz (und damit steigender Drehzahl) zunehmen und den Motor bei höheren Drehzahlen stärker erwärmen.
Die Kennlinien zur Motorauswahl sind für bestimmte Betriebs- und Einbaubedingungen des Motors gültig. Weichen die tatsächlichen Bedingungen davon ab, geben die Motorenlieferanten Reduktionsfaktoren an, um die das zulässige Drehmoment abgesenkt werden muss (Derating). Einige typische Ursachen für ein Derating sind nachfolgend angegeben:
Die Herstellerdokumentation enthält entsprechende Hinweise zum Derating, die genauestens befolgt werden sollten.
|
|
|
|
Anzeigen
|
w-tech, Neumannstr. 29, D-90763 Fürth, Tel. +49 (0)911 73 99
715, Fax +49 (0)911 73 99 716, info@w-tech.de
Impressum