
|
|
|
Magnetische Geber bestehen aus einem Abtastkopf und einem
Informationsträger. Der Abtastkopf enthält Sensorelemente,
die die Stärke des magnetischen Feldes an der Oberfläche
des Informationsträgers erfassen und in elektrische Signale umsetzen.
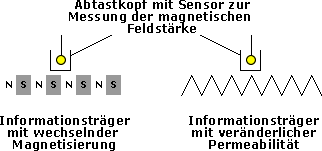 Der
Informationsträger besteht entweder aus einer Anreihung von Permanentmagneten
mit abwechselnd gegensinniger Magnetisierung oder aus einem metallischen
Element mit zyklisch veränderlicher Permeabilität.
Der
Informationsträger besteht entweder aus einer Anreihung von Permanentmagneten
mit abwechselnd gegensinniger Magnetisierung oder aus einem metallischen
Element mit zyklisch veränderlicher Permeabilität.
Bei diesen Gebern misst der Sensor unmittelbar die Stärke des magnetischen Feldes, das von den Permanentmagneten des Informationsträgers erzeugt wird. Zumeist besteht der Informationsträger aus einem ferritischen Material, das entsprechend magnetisiert wurde. Die Bereiche unterschiedlicher Magnetisierung können nicht beliebig schmal gemacht werden, so dass die erreichbare Auflösung begrenzt ist.
Geber mit veränderlicher Permeabilität weisen eine Oberfläche mit zyklischen Erhebungen und Vertiefungen auf. Damit ergibt sich ein zyklisch veränderlicher Luftspalt und damit ein zyklisch schwankender magnetischer Widerstand (Permeabilität). Wird der Informationsträger einem Magnetfeld ausgesetzt, das zum Beispiel im Abtastkopf erzeugt wurde, entsteht eine typische Verteilung der magnetischen Feldstärke über der Oberfläche des Informationsträgers. Bereiche größerer Feldstärke wechseln sich mit Bereichen geringerer Feldstärke ab. Diese Verteilung wird vom Sensor erfasst.
Informationsträger mit veränderlicher Permeabilität können in unterschiedlicher Präzision hergestellt werden. Einfachste Anwendungen verwenden Zahnräder als Informationsträger, anspruchsvolle Anwendungen Stahlbänder mit eingeätzter Oberflächenstruktur.
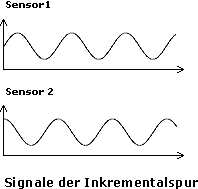 Der
Informationsträger weist einen Bereich zyklisch wechselnder Magnetisierung
oder Permeabilität auf. Dieser Bereich wird als Inkrementalspur
bezeichnet. Findet zwischen Informationsträger und Sensor eine
Relativbewegung statt, generiert der Sensor, der die Inkrementalspur
abtastet, ein sinusförmiges Signal. Jede Signalperiode entspricht
einer Relativbewegung von einer magnetischen Teilung und wird als
Inkrement bezeichnet.
Der
Informationsträger weist einen Bereich zyklisch wechselnder Magnetisierung
oder Permeabilität auf. Dieser Bereich wird als Inkrementalspur
bezeichnet. Findet zwischen Informationsträger und Sensor eine
Relativbewegung statt, generiert der Sensor, der die Inkrementalspur
abtastet, ein sinusförmiges Signal. Jede Signalperiode entspricht
einer Relativbewegung von einer magnetischen Teilung und wird als
Inkrement bezeichnet.
Ein einzelnes sinusförmiges Signal reicht zur eindeutigen Lagebestimmung noch nicht aus. Deshalb werden im praktischen Einsatz zwei Sensoren verwendet. Sie sind um eine halbe magnetische Teilung (90°) versetzt angeordnet. Bei einer Relativbewegung zwischen dem Informationsträger und dem Abtastkopf, der beide Sensoren enthält, entstehen zwei Signale, ein Sinus- und ein Cosinussignal. Die gleichzeitige Auswertung beider Signale gestattet die eindeutige Lagebestimmung.
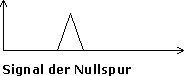 Die
inkrementellen Lageinformationen sind relativ. Mit ihrer Hilfe kann
eine Lageänderung leicht erfasst werden. In praktischen Anwendungen
sind jedoch absolute Lageinformationen bezogen auf einen Referenzpunkt
erforderlich. Für diesen Zweck verfügen magnetische Geber
auf ihrem Informationsträger neben der Inkrementalspur zusätzlich
über eine Nullspur. Diese weist nur einen einzigen schmalen Bereich
mit einer veränderlichen Feldstärke oder Permeabilität
auf (z. B. ein Zahnrad mit nur einem Zahn).
Die
inkrementellen Lageinformationen sind relativ. Mit ihrer Hilfe kann
eine Lageänderung leicht erfasst werden. In praktischen Anwendungen
sind jedoch absolute Lageinformationen bezogen auf einen Referenzpunkt
erforderlich. Für diesen Zweck verfügen magnetische Geber
auf ihrem Informationsträger neben der Inkrementalspur zusätzlich
über eine Nullspur. Diese weist nur einen einzigen schmalen Bereich
mit einer veränderlichen Feldstärke oder Permeabilität
auf (z. B. ein Zahnrad mit nur einem Zahn).
Im gesamten absoluten Verfahrbereich des Gebers (bei rotatorischen Gebern innerhalb einer Umdrehung) wird der zugehörige Sensor für die Nullspur nur in einer ganz bestimmten Relativposition von Informationsträger und Abtastkopf, der den Sensor enthält, mit einem veränderlichen Magnetfeld beaufschlagt und gibt ein entsprechendes Ausgangssignal, den Nullimpuls ab.
|
|
|
|
Anzeigen
|
w-tech, Neumannstr. 29, D-90763 Fürth, Tel. +49 (0)911 73 99
715, Fax +49 (0)911 73 99 716, info@w-tech.de
Impressum