
|
|
|
Der Elektromotor ist die zentrale Komponente eines jedes elektrischen
Antriebes. Er dient im motorischen Betrieb als Energiewandler, der die
zugeführte elektrische Energie in mechanische Energie umsetzt. Im
generatorischen Betrieb (z. B. bei Bremsvorgängen) kehrt sich der
Energiefluss um. Die eingespeiste mechanische Energie wird dann in elektrische
Energie umgewandelt und ins Netz zurückgespeist.
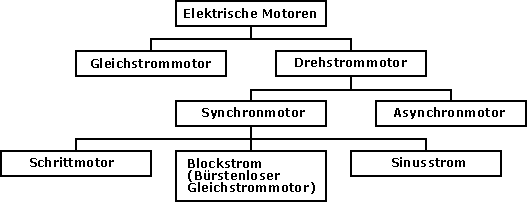
Die Anforderungen an Elektromotoren sind äußerst vielfältig.
Nicht zuletzt deshalb haben sich sehr verschiedene Ausführungen von
Motoren entwickelt. Folgende Übersicht dient zur Systematisierung
der gebräuchlichsten Motoren:
Gleichstrommotoren zeichnen sich durch eine hohe Dynamik aus und sind relativ leicht zu regeln. Sie werden mit einer Gleichspannung beaufschlagt, deren Betrag und Polarität zum Zweck der Drehzahlbeeinflussung verändert wird. Konstruktionsbedingt verfügen Gleichstrommotoren über einen Kollektor auf der Rotorwelle. Über Bürsten wird die elektrische Energie auf den Kollektor und von dort in die Rotorwicklung übertragen. Die Bürsten sind einem Verschleiß unterworfen und müssen gewartet werden. In der eingeschränkten Robustheit und der fehlenden Wartungsfreiheit liegt der größte Nachteil des Gleichstrommotors.
Das Funktionsprinzip von Drehstrommotoren beruht auf einem rotierenden Drehfeld. Dieses Drehfeld wird entweder unmittelbar aus einem mehrphasigen Drehstromsystem gespeist oder bei 2-phasiger Speisung durch Hilfskondensatoren erzeugt.
- permanenterregten Motoren durch Permanentmagnete, die auf dem Rotor aufgebracht sind, erzeugt,
- bei elektrisch erregten Motoren durch eine stromdurchflossene Erregerwicklung hervorgerufen oder
- bei Reluktanzmotoren durch einen ungleichmäßigen Luftspalt (Nutung der Oberfläche) bzw. Läufer mit nichtmagnetischen Volumensanteilen
erreicht. Die magnetischen Vorzugsrichtungen sind durch die Konstruktion des Rotors festgelegt. Wird nun der Rotor dem Drehfeld des Stators ausgesetzt, richtet sich der Rotor nach dem magnetischen Feld des Stators aus und folgt diesem synchron. Zwischen der Winkelgeschwindigkeit des Statorfeldes und der Winkelgeschwindigkeit des Rotors herrscht Synchronität - daher der Name Synchronmotor.
Da die Winkelgeschwindigkeit des Statorfeldes von der Frequenz der speisenden Spannung abhängt, kann über eine Veränderung der Frequenz der speisenden Spannung eine Drehzahländerung des Rotors erreicht werden.
|
|
|
|
Anzeigen
|
w-tech, Neumannstr. 29, D-90763 Fürth, Tel. +49 (0)911 73 99
715, Fax +49 (0)911 73 99 716, info@w-tech.de
Impressum