
|
|
|
Würde man einen Gleichstrommotor aufbauen, der aus einer im Magnetfeld rotierenden Leiterschleife besteht, hätte dieser Motor wesentliche Nachteile:
Um sehr große Lorentzkräfte bzw. Drehmomente zu erzeugen, muss ein sehr hoher Strom durch die Leiterschleife fließen. Die Leiterschleife müsste mit einem entsprechend starken Leiterquerschnitt ausgeführt werden.
Die Lorentzkraft hat immer die gleiche Richtung. Das hat zur Folge, dass sie je nach Lage der Leiterschleife unterschiedlich stark zur Drehung der Leiterschleife beiträgt. In senkrechter Lage wirkt sie maximal, in waagerechter Lage wirkt sie gar nicht. Das heißt, dass das auf die Leiterschleife wirkende Drehmoment (Kraftwirkung in radialer Richtung) nicht konstant ist sondern nach einer Sinusfunktion zwischen Null und einem Maximalwert variiert.
Um diese Nachteile zu beseitigen, werden reale Gleichstrommotoren anders ausgeführt.
Die Abbildung zeigt beispielhaft eine Anordnung bestehend aus 4 Wicklungen. Die aktiven Wicklungsteile ragen in die Zeichnungsebene hinein, sichtbar sind deshalb nur die Schnittflächen der Wicklungen. Die Wicklungsköpfe sind nicht dargestellt. Die Wicklungsenden sind mit den 4 Kommutatorlamellen verbunden. Gut zu erkennen ist die Reihenschaltung der Wicklungen .. 1 .. 2 .. 3 .. 4 .. 1 ..
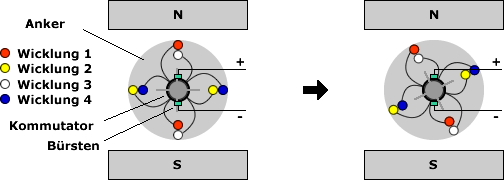
Befindet sich der Anker in der links dargestellten Position,
sind nur die Wicklungen 1 und 3 stromführend. Die Wicklungen 2
und 4 sind in der Kommutierungsphase und werden durch die Bürsten
kurzgeschlossen. Der Strom fließt parallel durch die Wicklungen
1 und 3. Beide Wicklungen tragen aufgrund ihrer augenblicklichen Position
maximal zur Entstehung des Drehmomentes bei.
Dreht sich der Anker weiter (rechts dargestellte Position), stehen die
Bürsten jeweils vollständig auf einer Lamelle des Kommutators.
Der Strom fließt jetzt parallel durch die Wicklungen 3 .. 2 und
4 .. 1. Alle Wicklungen tragen zur Drehmomentbildung bei. Dabei nimmt
das von den Wicklungen 1 und 3 hervorgerufene Drehmoment ab, während
das durch die Wicklungen 2 und 4 hervorgerufene Drehmoment zunimmt.
Schließlich schließen die Bürsten die Wicklungen 1
und 3 kurz und nur die Wicklungen 2 und 4 sind stromführend.
Dieser Vorgang setzt sich mit der weiteren Drehung des Ankers fort.
Jeweils abwechselnd werden die Wicklungen 2 und 4 sowie 1 und 3 kurzgeschlossen
und die Stromrichtung in diesen Wicklungen umgekehrt. Es wird jeweils
ein Wicklungspaar kommutiert, während das andere Wicklungspaar
stromführend bleibt und ein Drehmoment hervorruft. Ein Totpunkt,
bei dem sich die Lorentzkräfte wie bei einer einzelnen Leiterschleife
kompensieren, tritt nicht mehr auf.
Die Abbildung verdeutlicht das Wicklungsprinzip an einem sehr einfachen Modell. In realen Gleichstrommotoren werden mehr als 4 Wicklungen verwendet. Damit wird der Drehmomentverlauf stark geglättet. Es ergibt sich dann ein Drehmoment, dessen Betrag nahezu unabhängig von der Stellung des Ankers ist.
|
|
|
|
Anzeigen
|
w-tech, Neumannstr. 29, D-90763 Fürth, Tel. +49 (0)911 73 99
715, Fax +49 (0)911 73 99 716, info@w-tech.de
Impressum