Experimentieren Sie mit virtuellen Testständen im:

Legen Sie Antriebe aus mit:

Der Gleichstrommotor
Bauformen
Im Bereich der Servoantriebstechnik werden im wesentlichen drei Bauarten
von Gleichstrommotoren eingesetzt:
| |
Schlankankermotor |
Glockenläufermotor |
Scheibenläufermotor |
| Drehmoment |
bis 150 Nm |
bis 0,2 Nm |
bis 20 Nm |
| Drehzahl |
bis 20 000 U/min |
bis 20 000 U/min |
6 000 U/min |
| Leistung |
bis 4 kW |
bis 0,04 kW |
bis 5 kW |
Allen Bauarten ist gemeinsam, dass das erforderliche magnetische
Feld durch Permanentmagnete erzeugt wird. Motoren mit elektrisch erzeugten
Erregerfeld kommen in Servoanwendungen selten vor und werden deshalb nicht
weiter betrachtet.
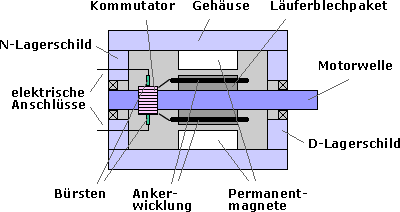
Schlankankermotor
 Der
Schlankankermotor trägt seinen Namen aufgrund seines geringen
Läuferdurchmessers im Vergleich zur Länge des Motors.
Der geringe Durchmesser des Läufers reduziert dessen Trägheitsmoment
und verbessert die dynamischen Eigenschaften des Motors. Der
Schlankankermotor trägt seinen Namen aufgrund seines geringen
Läuferdurchmessers im Vergleich zur Länge des Motors.
Der geringe Durchmesser des Läufers reduziert dessen Trägheitsmoment
und verbessert die dynamischen Eigenschaften des Motors.
Der Läufer ist aus geblechtem Eisen aufgebaut. Die Wicklung
ist entweder in Nuten eingebracht (siehe Abbildung) oder bei einem
nutenlosen Läufer auf der Oberfläche des Blechpaketes
befestigt. Der eisenbehaftete Läufer weist eine hohe Wärmekapazität
auf und ermöglicht deshalb eine längere Stromüberlastung
der Ankerwicklung (bis zum 10-fachen des Nennwertes).
Der magnetische Rückschluss erfolgt über das Gehäuse
des Motors.
|
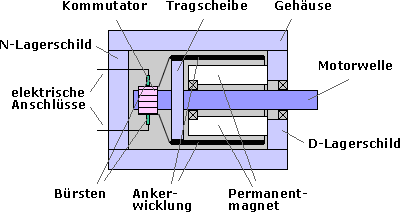
Glockenläufermotor
 Beim
Glockenläufermotor ist die Ankerwicklung auf einer Tragscheibe
befestigt. Die Ankerwicklung umschließt den Permanentmagnet,
der am D-seitigen Lagerschild montiert ist. Der magnetische
Rückfluss erfolgt durch das Gehäuse. Beim
Glockenläufermotor ist die Ankerwicklung auf einer Tragscheibe
befestigt. Die Ankerwicklung umschließt den Permanentmagnet,
der am D-seitigen Lagerschild montiert ist. Der magnetische
Rückfluss erfolgt durch das Gehäuse.
Die Ankerwicklung ist eisenlos ausgeführt. Damit ergibt sich
ein sehr kleines Trägheitsmoment.
Glockenläufermotoren können in sehr kleinen Abmessungen
(wenige Millimeter Durchmesser) hergestellt werden.
|
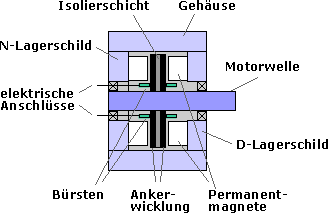
Scheibenläufermotor
 Beim
Scheibenläufermotor besteht die Ankerwicklung aus Leiterbahnen,
die unmittelbar auf eine Isolierschicht aufgebracht sind. Im
einfachsten Fall befinden sich auf der Vorder- und Rückseite
der Isolierschicht die Hin- und Rückleiter. Beim
Scheibenläufermotor besteht die Ankerwicklung aus Leiterbahnen,
die unmittelbar auf eine Isolierschicht aufgebracht sind. Im
einfachsten Fall befinden sich auf der Vorder- und Rückseite
der Isolierschicht die Hin- und Rückleiter.
Das Magnetfeld wird durch Permanentmagnete erzeugt, die an den Lagerschilden
angebracht sind. Der magnetische Rückfluss erfolgt durch das
Gehäuse.
Ein Kommutator ist nicht erforderlich, da die Bürsten unmittelbar
auf den Leiterbahnen kontaktieren.
Die Ankerwicklung ist eisenlos ausgeführt. Damit ergibt sich
ein sehr kleines Trägheitsmoment.
|
 |
|
|
