
|
|
|
Der Lageregelkreis besteht aus dem Lageregler und der Regelstrecke. Die
Regelstrecke enthält den drehzahlgeregelten Motor mit der angekoppelten
Mechanik der Arbeitsmaschine.
Die Ausgangsgröße des Lagereglers und damit Eingangsgröße
der Regelstrecke ist der Drehzahlsollwert. Der unterlagerte Drehzahlregelkreis
sorgt für eine dynamische Verstellung der Drehzahl. Er kann für
die grundlegende Betrachtung der Lageregelung vereinfacht und durch ein
PT1-Glied mit einer kleinen Verzögerungszeitkonstante nachgebildet
werden.
Die vom Drehzahlregelkreis bereitgestellte Drehzahl führt zu Lageänderungen
an der Motorwelle und an den mechanischen Komponenten der angeschlossenen
Arbeitsmaschine. Der Zusammenhang zwischen Drehzahl bzw. Winkelgeschwindigkeit
und mechanischer Lage wird durch ein I-Glied beschrieben. Als Integrationszeitkonstante
zwischen Drehzahl und gemessenem Lageistwert wird die Getriebeübersetzung
wirksam.
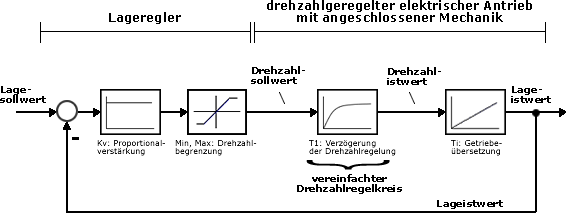
Der Lageregler wird typischer Weise als P-Regler, bestehend aus einem
P-Glied, ausgelegt. Er gibt den Drehzahlsollwert aus, der anschließend
entsprechend den Gegebenheiten des Antriebes und der angeschlossenen Arbeitsmaschine
auf einen Maximalwert begrenzt wird.
Der P-Regler dient zur unverzögerten Reaktion auf Sollwertänderungen
bzw. das Einwirken von Störgrößen. Treten aufgrund dieser
Vorgänge Regelabweichungen auf, bewirkt das P-Glied eine sofortige
Änderung der Solldrehzahl und damit eine unverzögerte Reaktion
des Lagereglers. Die Dynamik des Lageregelkreises hängt von der Proportionalverstärkung
des Lagereglers, dem kv-Faktor ab. Es wird angestrebt, diesen so groß
wie möglich einzustellen.
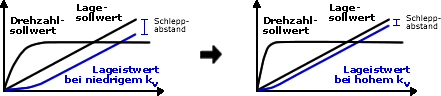 Der
kv-Faktor beeinflusst unmittelbar die Größe des Schleppabstandes,
der bei Verfahrvorgängen auftritt. Je größer der kv-Faktor
ist, umso kleiner ist der sich einstellende Schleppabstand. Es besteht
folgender Zusammenhang:
Der
kv-Faktor beeinflusst unmittelbar die Größe des Schleppabstandes,
der bei Verfahrvorgängen auftritt. Je größer der kv-Faktor
ist, umso kleiner ist der sich einstellende Schleppabstand. Es besteht
folgender Zusammenhang:
Schleppabstand = Verfahrgeschwindigkeit/kv-Faktor
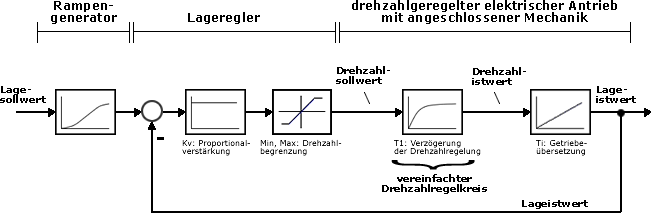
Lageregler sind im allgemeinen Bestandteil einer Bewegungssteuerung. In Abhängigkeit von der zu lösenden Bewegungsaufgabe weist der Lagesollwert unterschiedliche zeitliche Verläufe auf.
Das Führungsverhalten von lagegeregelten Antrieben kann durch die Vorsteuerung von Drehzahl und Drehmoment stark verbessert werden. Dazu wird der mathematische Zusammenhang zwischen Lage, Drehzahl und Drehmoment ausgenutzt. Ist der zeitliche Verlauf des Lagesollwertes bekannt, kann durch Differentiation des Lagesollwertes berechnet werden, welche Verläufe von Drehzahl und Drehmoment erforderlich sind. Diese werden als Vorsteuerwerte zusätzlich in den Drehzahl- bzw. Stromregelkreis eingespeist. Sie stehen damit viel schneller zur Verfügung, als wenn sie erst durch die Reaktion der zugehörigen Regler erzeugt werden müssten. Strom- und Drehzahlregler werden entlastet und der Antrieb wird dynamischer.
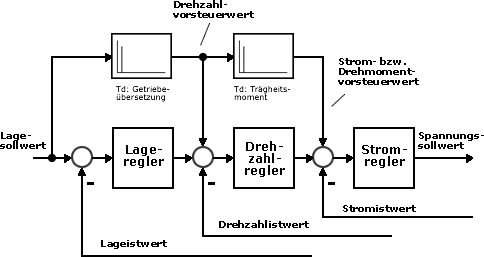
In der praktischen Realisierung werden die Vorsteuerwerte für den Drehzahl- und den Stromregler innerhalb der Bewegungssteuerung gebildet. Bei dieser Vorgehensweise ist es möglich, auch die Maximalwerte für die Drehzahl und das Drehmoment zu berücksichtigen und den zeitlichen Verlauf des Lagesollwertes so vorzugeben, dass die Begrenzungen in den Regelkreisen nicht wirksam werden.
|
|
|
|
Anzeigen
|
w-tech, Neumannstr. 29, D-90763 Fürth, Tel. +49 (0)911 73 99
715, Fax +49 (0)911 73 99 716, info@w-tech.de
Impressum