
|
|
|
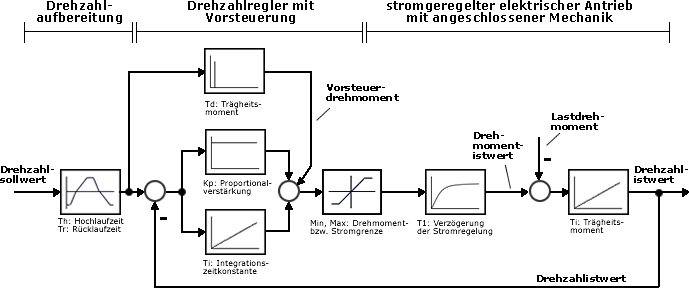
Der Drehzahlregelkreis besteht aus dem Drehzahlregler und der Regelstrecke.
Die Regelstrecke enthält das Leistungsteil, den Motor mit der angekoppelten
Mechanik der Arbeitsmaschine sowie den unterlagerten Stromregelkreis.
Die Ausgangsgröße des Drehzahlreglers und damit Eingangsgröße
der Regelstrecke ist der Drehmomentsollwert. In der praktischen Realisierung
wird jedoch anstelle des Drehmomentsollwertes ein Stromsollwert verwendet,
der dem Drehmoment proportional ist. Der unterlagerte Stromregelkreis
sorgt für eine schnelle Einprägung des Stromes und damit des
gewünschten Motordrehmomentes. Für die Betrachtungen zur Drehzahlregelung
kann der Stromregelkreis vereinfacht und durch ein PT1-Glied mit einer
kleinen Verzögerungszeitkonstante nachgebildet werden. Die Besonderheiten
der verwendeten Motoren, Leistungsteile und Stromregelalgorithmen spielen
auf der Ebene des Drehzahlregelkreises keine Rolle mehr. Deshalb ist auch
eine getrennte Darstellung für Gleichstrom- und Drehstromantriebe
nicht erforderlich.
Dem Motordrehmoment entgegen wirkt das Lastdrehmoment. Die Differenz aus
Motor- und Lastdrehmoment wirkt beschleunigend auf die Motorwelle und
die angeschlossene Mechanik. Diese werden mit einem I-Glied beschrieben,
an dessen Ausgang die Winkelgeschwindigkeit bzw. die Drehzahl wirksam
wird.
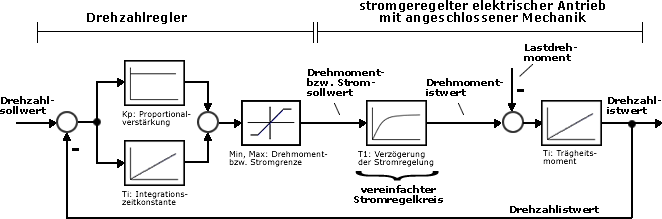
Der Drehzahlregler wird wie der Stromregler typischer Weise als PI-Regler ausgelegt. Er besteht aus einem P-Glied und einem I-Glied, die parallel geschaltet sind. Die Summe der Ausgangssignale ergibt das Solldrehmoment, das anschließend entsprechend den Gegebenheiten des Antriebes und der angeschlossenen Arbeitsmaschine auf einen Maximalwert begrenzt wird.
Das P-Glied und das I-Glied übernehmen unterschiedliche Aufgaben im Drehzahlregler:
Die Verwendung eines PI-Reglers ist mit dem Nachteil verbunden, dass dynamische Regelvorgänge immer mit einem Über- bzw. Unterschwingen des Drehzahlistwertes verbunden sind. Durch entsprechende Wahl der Reglerparameter muss ein Kompromiss zwischen einer hohen Dynamik und einer akzeptablen Überschwingweite gefunden werden.
Drehzahlgeregelte Antriebe sind im allgemeinen sehr dynamisch und reagieren
schnell auf Änderungen des Drehzahlsollwertes. Es gibt jedoch eine
Reihe von Anwendungen, in denen häufige Änderungen des Drehzahlsollwertes
nicht erforderlich sind. Die Dynamik des Antriebs wird dann ausschließlich
für die schnelle Ausregelung von Störgrößen benötigt.
Um den Antrieb definiert auf seine Betriebsdrehzahl hochzufahren bzw.
von dieser wieder stillzusetzen, wird ein rampenförmiger Drehzahlsollwert
benötigt. Dieser wird mit Hilfe eines Hochlaufgebers gebildet. Er
begrenzt den Anstieg des Drehzahlsollwertes in positiver und negativer
Richtung und wandelt einen sprungfömigen Sollwert in einen rampenförmigen
Sollwert um. Die Steilheit der Drehzahlrampen ist je nach Anwendungsfall
einstellbar.
|
Name
|
Beschreibung
|
Signalverlauf bei
Sprung auf positiven Sollwert |
Signalverlauf bei Sprung auf 0 |
Parameter
|
Symbol |
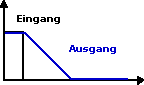
| Hochlauf- geber |
Das Eingangssignal wird in seinem Anstieg begrenzt. |  |
 |
Hochlauf- |
 |
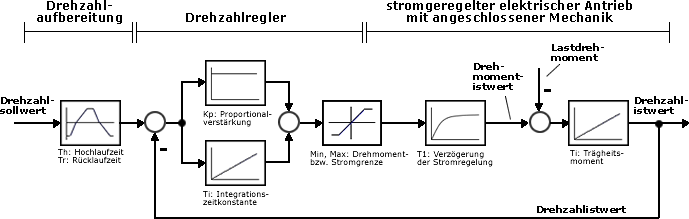
Hinweis: Ist dem Drehzahlregler noch ein Lageregelkreis überlagert, kommt kein Hochlaufgeber zum Einsatz.
Wird der Drehzahlregler mit einem rampenförmigen Drehzahlsollwert
beaufschlagt, stellt sich nach einer gewissen Zeit am Ausgang des Drehzahlregler
ein konstanter Sollwert für das Motordrehmoment ein. Dieser Sollwert
wird mit Hilfe des Stromreglers eingeprägt und beschleunigt den Motor
und die angeschlossene Mechanik. Betrachtet man die Signale innerhalb
des Drehzahlreglers während der Beschleunigungsphase, so stellt man
fest, dass nach einer kurzen Anlaufphase lediglich das I-Glied wirksam
ist und das P-Glied nahezu kein Ausgangssignal liefert. Dieser Zustand
ist ungünstig, da nach Erreichen der Solldrehzahl das I-Glied immer
noch ein Solldrehmoment abgibt, der Antrieb weiter beschleunigt und der
Drehzahlistwert überschwingt. Dann tritt am Eingang des Drehzahlregler
eine negative Soll-Ist-Differenz auf, die schließlich zum Abbau
des im I-Glied "gespeicherten" Drehmomentsollwertes führt.
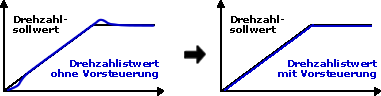 Diese
Verhalten kann durch eine Vorsteuerung des Drehmomentsollwertes deutlich
verbessert werden. Dazu wird der wirksame Drehzahlsollwert über ein
D-Glied geführt. Die Zeitkonstante des D-Glieds entspricht der mechanischen
Trägheit des Motors und der angeschlossenen Mechanik. Unter dieser
Bedingung steht am Ausgang des D-Glieds genau das Solldrehmoment zur Verfügung,
das für die Beschleunigung des Antriebes benötigt wird. Schaltet
man diesen Sollwert zusätzlich auf den Ausgang des Drehzahlreglers,
wird das I-Glied im Drehzahlregler praktisch nicht mehr wirksam. Das für
die Beschleunigung erforderliche Drehmoment wird über die Vorsteuerung
hervorgerufen. Es verschwindet in dem Augenblick, in dem keine Beschleunigung
des Antriebes mehr gefordert wird. Das Überschwingen der Drehzahl
tritt nicht mehr auf.
Diese
Verhalten kann durch eine Vorsteuerung des Drehmomentsollwertes deutlich
verbessert werden. Dazu wird der wirksame Drehzahlsollwert über ein
D-Glied geführt. Die Zeitkonstante des D-Glieds entspricht der mechanischen
Trägheit des Motors und der angeschlossenen Mechanik. Unter dieser
Bedingung steht am Ausgang des D-Glieds genau das Solldrehmoment zur Verfügung,
das für die Beschleunigung des Antriebes benötigt wird. Schaltet
man diesen Sollwert zusätzlich auf den Ausgang des Drehzahlreglers,
wird das I-Glied im Drehzahlregler praktisch nicht mehr wirksam. Das für
die Beschleunigung erforderliche Drehmoment wird über die Vorsteuerung
hervorgerufen. Es verschwindet in dem Augenblick, in dem keine Beschleunigung
des Antriebes mehr gefordert wird. Das Überschwingen der Drehzahl
tritt nicht mehr auf.
Bei Bremsvorgängen wirkt die Vorsteuerung in gleicher Weise aber mit umgekehrten Vorzeichen. Sie erzeugt dann den Sollwert für das erforderliche Bremsmoment.
|
|
|
|
Anzeigen
|
w-tech, Neumannstr. 29, D-90763 Fürth, Tel. +49 (0)911 73 99
715, Fax +49 (0)911 73 99 716, info@w-tech.de
Impressum