
|
|
|
, Bürstenlose Gleichstrommotoren zeichnen sich dadurch aus,
dass in Abhängigkeit von der Stellung der Polrades die an den Motorklemmen
wirksame Spannung weitergeschaltet wird. Der Stromfluss kommutiert dann
von einer Wicklung auf die nächste, das Drehmoment bleibt erhalten
und der Läufer dreht sich weiter. Nach einem bestimmten Drehwinkel
wird die wirksame Spannung erneut weitergeschaltet und der gesamte Ablauf
beginnt von vorn.
Bürstenlose Gleichstrommotoren zeichnen sich dadurch aus,
dass in Abhängigkeit von der Stellung der Polrades die an den Motorklemmen
wirksame Spannung weitergeschaltet wird. Der Stromfluss kommutiert dann
von einer Wicklung auf die nächste, das Drehmoment bleibt erhalten
und der Läufer dreht sich weiter. Nach einem bestimmten Drehwinkel
wird die wirksame Spannung erneut weitergeschaltet und der gesamte Ablauf
beginnt von vorn.
Nebenstehende Animation zeigt einen möglichen Verlauf
des Sollspannungszeigers. Dieser Sollspannungszeiger wird von der
Stromregelung ermittelt und an den Steuersatz übergeben. Entsprechend
dem realisierten Modulationsverfahren generiert der Steuersatz die
erforderlichen Ansteuersignale für den Pulsteller.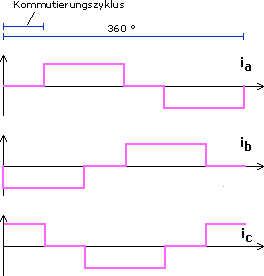
Betrachtet man die Phasenströme über mehrere Kommutierungszyklen
hinweg und vernachlässigt man die durch den Pulssteller verursachten
Oberschwingungen, erkennt man, dass die Phasenströme näherungsweise
einen block- oder trapezförmigen Verlauf aufweisen. Man spricht deshalb
beim Betrieb von bürstenlosen Gleichstrommotoren an einem Pulssteller
auch von "Blockkommutierung".
Die "Weiterschaltung" der Stromblöcke durch den Pulssteller
entspricht der mechanischen Kommutierung bei Gleichstrommotoren. Nur erfolgt
dieser Vorgang nicht zwangsläufig durch einen mechanischen Kommutator
und Kohlebürsten sondern wird elektronisch durchgeführt.
 Drehstrommotoren werden mit sinusförmigen Spannungen betrieben.
Im stationären Zustand rotiert der Sollspannungszeiger deshalb um
den Koordinatenursprung. Die Spitze des Zeigers beschreibt eine Kreisbahn.
Drehstrommotoren werden mit sinusförmigen Spannungen betrieben.
Im stationären Zustand rotiert der Sollspannungszeiger deshalb um
den Koordinatenursprung. Die Spitze des Zeigers beschreibt eine Kreisbahn.
Nebenstehende Animation zeigt einen möglichen Verlauf des Sollspannungszeigers. Dieser Sollspannungszeiger wird von der Stromregelung ermittelt und an den Steuersatz übergeben. Entsprechend dem realisierten Modulationsverfahren generiert der Steuersatz die erforderlichen Ansteuersignale für den Pulsteller.
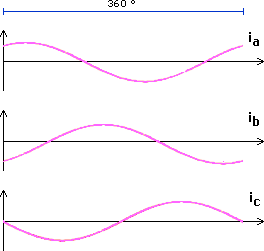 Betrachtet
man die resultierenden Phasenströme, so stellt man fest, dass
sie näherungsweise ebenfalls einen sinusförmigen Verlauf
aufweisen. Bei entsprechend hoher Pulsfrequenz können die durch
den Pulssteller verursachten Oberschwingungen vernachlässigt
werden. Man spricht deshalb beim Betrieb von Drehstrommotoren an einem
Pulssteller auch von "Sinuskommutierung".
Betrachtet
man die resultierenden Phasenströme, so stellt man fest, dass
sie näherungsweise ebenfalls einen sinusförmigen Verlauf
aufweisen. Bei entsprechend hoher Pulsfrequenz können die durch
den Pulssteller verursachten Oberschwingungen vernachlässigt
werden. Man spricht deshalb beim Betrieb von Drehstrommotoren an einem
Pulssteller auch von "Sinuskommutierung".
Die von Pulsstellern bereitgestellte Ausgangsspannung besteht aus einer Folge von positiven und negativen Spannungsimpulsen. Wird der Pulssteller mit einer hohen Pulsfrequenz betrieben, machen sich diese jedoch nur geringfügig in den Phasenströmen der angeschlossenen Motoren und im abgegebenen Drehmoment bemerkbar. Mit Pulsstellern sind deshalb Forderungen nach einer geringen Welligkeit im Drehmoment sehr gut erfüllbar.
Die Signalelektronik hat die Möglichkeit, zu jedem Zyklus die Einschaltzeiten der Transistoren zu verändern und damit die Phasenspannungen des Motors zu beeinflussen. Bei hohen Pulsfrequenzen und kurzen Zykluszeiten kann die Signalelektronik die Phasenströme deshalb sehr dynamisch regeln. Daraus ergeben sich Anregelzeiten für das Drehmoment des angeschlossenen Motors von weniger als 1 ms. Damit sind Pulssteller für Anwendungen mit hohen dynamischen Anforderungen auch bei Drehstrommotoren und bürstenlosen Gleichstrommotoren sehr gut geeignet.
|
|
|
|
Anzeigen
|
w-tech, Neumannstr. 29, D-90763 Fürth, Tel. +49 (0)911 73 99
715, Fax +49 (0)911 73 99 716, info@w-tech.de
Impressum