
|
|
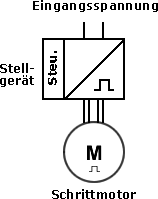 Stellgeräte
für Schrittmotoren wandeln eine Eingangsspannung in 2 Ketten
von Spannungsimpulsen um. Mit diesen werden die beiden Wicklungen
des angeschlossenen Schrittmotors beaufschlagt. Mit jedem Spannungsimpuls
dreht sich der Motor um einen definierten Winkelschritt weiter. Die
beiden Impulsfolgen sind zueinander um 90° versetzt.
Stellgeräte
für Schrittmotoren wandeln eine Eingangsspannung in 2 Ketten
von Spannungsimpulsen um. Mit diesen werden die beiden Wicklungen
des angeschlossenen Schrittmotors beaufschlagt. Mit jedem Spannungsimpuls
dreht sich der Motor um einen definierten Winkelschritt weiter. Die
beiden Impulsfolgen sind zueinander um 90° versetzt.
Die Frequenz der ausgegebenen Impulsketten dient als Stellgröße
für die Drehzahl des Schrittmotors. Der Betrieb des Motors erfolgt
gesteuert. Ein Sensor zur Erfassung der Lage oder der Drehzahl ist deshalb
nicht erforderlich.
Stellgeräte für Schrittmotoren können sowohl unipolar als auch bipolar ausgeführt werden.
Nachfolgend wird deshalb nur auf Stellgeräte mit bipolarer Ansteuerung näher eingegangen.
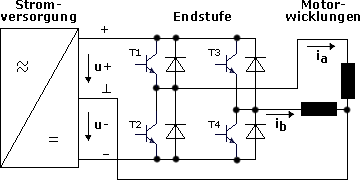 Eingangsseitig
verfügt das Stellgerät über eine Stromversorgung, die
eine Eingangsspannung in 2 Ausgangsspannungen mit gleichem Betrag
aber unterschiedlichem Vorzeichen umwandelt. Je nach Anwendungsfall
sind Ein- und Ausgangsspannung der Stromversorgung sehr unterschiedlich.
Es gibt Stellgeräte, die auf sehr kleine Eingangsspannungen,
wie sie z. B. ein PC zur Verfügung stellen kann, ausgelegt sind.
Andere Stellgeräte sind für den direkten Anschluss an das
Wechselspannungsnetz vorgesehen. Die Ausgangsspannungen der Stromversorgung
richten sich nach der Größe des angeschlossenen Schrittmotors.
Eingangsseitig
verfügt das Stellgerät über eine Stromversorgung, die
eine Eingangsspannung in 2 Ausgangsspannungen mit gleichem Betrag
aber unterschiedlichem Vorzeichen umwandelt. Je nach Anwendungsfall
sind Ein- und Ausgangsspannung der Stromversorgung sehr unterschiedlich.
Es gibt Stellgeräte, die auf sehr kleine Eingangsspannungen,
wie sie z. B. ein PC zur Verfügung stellen kann, ausgelegt sind.
Andere Stellgeräte sind für den direkten Anschluss an das
Wechselspannungsnetz vorgesehen. Die Ausgangsspannungen der Stromversorgung
richten sich nach der Größe des angeschlossenen Schrittmotors.
Der Stromversorgung nachgeschaltet ist die eigentliche Endstufe.
Sie besteht aus 4 Transistoren und 4 Freilaufdioden. Jeweils zwei Transistoren
sind in Reihe geschaltet. Parallel zu jedem Transistor ist eine Freilaufdiode
angeordnet. Sie weist jeweils die entgegengesetzte Stromflussrichtung
des zugehörigen Transistors auf.
Jeweils 2 Transistoren und 2 Dioden bilden einen Brückenzweig.
An jedem Brückenzweig ist eine Wicklung des Schrittmotors angeschlossen.
Das andere Wicklungsende wird am gemeinsamen Bezugspunkt der Ausgangsspannungen
aufgelegt.
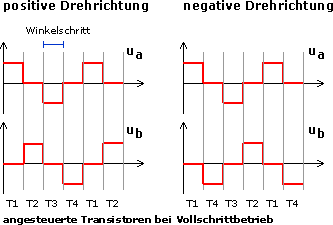 Die
Transistoren werden so angesteuert, dass an den Wicklungen des Schrittmotors
entweder die positive oder die negative Ausgangsspannung oder keine
Spannung anliegt. Dementsprechend ergibt sich in den Wicklungen A
und B entweder ein positiver, ein negativer oder kein Stromfluss.
Die
Transistoren werden so angesteuert, dass an den Wicklungen des Schrittmotors
entweder die positive oder die negative Ausgangsspannung oder keine
Spannung anliegt. Dementsprechend ergibt sich in den Wicklungen A
und B entweder ein positiver, ein negativer oder kein Stromfluss.
Der Stromfluss gleicht äußerlich (abgesehen von einem kurzen
Einschwingvorgang am Beginn jedes Impulses) weitgehend dem Verlauf der
wirksamen Spannungen.
Der dargestellte Spannungsverlauf entspricht einem Vollschrittbetrieb. Das heißt, bei jeder Änderung der Ausgangsspannung bewegt sich der Läufer des angeschlossenen Schrittmotors um eine Polteilung und damit um einen ganzen Winkelschritt weiter.
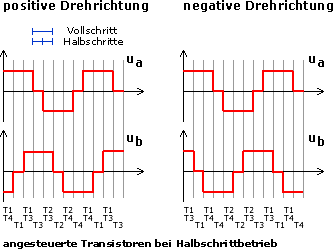 Durch
eine Modifikation der Ansteuerung lässt sich auch ein Halbschrittbetrieb
realisieren. Die Transistoren werden in dieser Betriebsart so angesteuert,
dass in bestimmten Zeiträumen beide Wicklungen des Schrittmotors
stromführend sind. In diesem Zustand richtet sich der Läufer
des Schrittmotors zwischen zwei Polteilungen aus und kann damit einen
Zwischenschritt bzw. "Halbschritt" ausführen. Auf diese
Weise kann eine mechanische Umdrehung des Läufers in doppelt
so viele Schritte unterteilt und die Auflösung der Sollposition
verdoppelt werden.
Durch
eine Modifikation der Ansteuerung lässt sich auch ein Halbschrittbetrieb
realisieren. Die Transistoren werden in dieser Betriebsart so angesteuert,
dass in bestimmten Zeiträumen beide Wicklungen des Schrittmotors
stromführend sind. In diesem Zustand richtet sich der Läufer
des Schrittmotors zwischen zwei Polteilungen aus und kann damit einen
Zwischenschritt bzw. "Halbschritt" ausführen. Auf diese
Weise kann eine mechanische Umdrehung des Läufers in doppelt
so viele Schritte unterteilt und die Auflösung der Sollposition
verdoppelt werden.
Eine weitere Betriebsart stellt der Mikroschrittbetrieb dar. Bei dieser Betriebsart werden die Ausgangsspannungen durch Pulsbreitenmodulation nochmals in verschiedene Spannungspegel unterteilt. Damit können nahezu beliebige Zwischenstufen realisiert werden und eine mechanische Umdrehung ist in eine Vielzahl sehr feiner Schritte auflösbar.
Stellgeräte für Schrittmotoren arbeiten gesteuert. Sie verfügen nicht über eine Stromregelung. Die Ströme in den Wicklungen des Schrittmotors stellen sich "frei" ein. Rückwirkungen aufgrund der vom Läufer induzierten Gegenspannung werden nicht kompensiert. Damit ergeben sich Begrenzungen in der maximalen Drehzahl, im erzielbaren Drehmoment bei höheren Drehzahlen und im Beschleunigungsvermögen. Schrittantriebe sind deshalb für Anwendungen im Bereich kleinerer Leistung mit mittleren Anforderungen an die Dynamik geeignet.
|
|
|
Anzeigen
|
w-tech, Neumannstr. 29, D-90763 Fürth, Tel. +49 (0)911 73 99
715, Fax +49 (0)911 73 99 716, info@w-tech.de
Impressum