
|
|
|
In der mechanischen Motorauslegung wird ein Motor anhand seiner Kenngrößen
aus einer Liste verfügbarer Motoren ausgewählt. Die Liste der
verfügbaren Motoren kann z.B. alle Motoren eines Herstellers oder
die in einem Unternehmen zugelassenen Motoren enthalten. Unter wirtschaftlichen
Gesichtspunkten wird dabei der Motor gesucht, der die geforderten Kenngrößen
gerade erfüllt und so gering wie möglich überdimensioniert
ist.
Die entscheidenden Kenngrößen sind die erforderliche Motordrehzahl
und das vom Motor aufzubringende Drehmoment. Diese Bewegungsgrößen
müssen aus den eigentlichen Prozessgrößen ermittelt werden.
Als Ergebnis dieser Tätigkeit liegen die folgenden zwei Diagramme
vor:
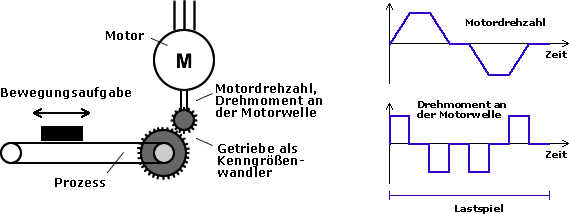
Unter Verwendung dieser Diagramme kann ein passender Motor ausgewählt werden.
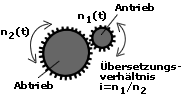
Zwischen der Motorwelle und dem im Prozess wirkenden Maschinenelement sind in vielen Fällen ein oder mehrere Getriebe angeordnet. Die Getriebe wirken als Kenngrößenwandler und dienen zur Anpassung des Motors an die Arbeitsmaschine. Getriebe wandeln
um. Andere Getriebetypen sollen nicht betrachtet werden.
Zwischen der Bewegungsgeschwindigkeit im Prozess, der Lastgeschwindigkeit und der eigentlichen Motordrehzahl besteht bei den meisten Anwendungen ein einfacher linearer Zusammenhang. Die Motordrehzahl kann durch Multiplikation mit einem durch die Getriebekonstruktion vorgegebenen Faktor aus der Lastgeschwindigkeit ermittelt werden. Die nachfolgende Tabelle zeigt die Zusammenhänge für die wichtigsten Getriebearten.
|
Getriebe
|
Darstellung
|
Bewegungsgröße
Abtrieb |
Bewegungsgröße |
Wandlungs-
gesetz |
|
Riemen- |
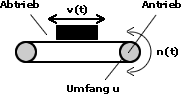 |
Geschwindigkeit: v(t) | Drehzahl: n(t) | v(t)=n(t)*u |
| Spindel |
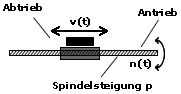 |
Geschwindigkeit: v(t) | Drehzahl: n(t) | v(t)=n(t)*p |
|
Zahn- |
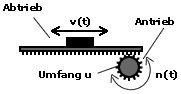 |
Geschwindigkeit: v(t) | Drehzahl: n(t) | v(t)=n(t)*u |
|
Rot. |
 |
Drehzahl: n1(t) | Drehzahl: n2(t) | n1(t)=n2(t)*i |
Sind mehrere Getriebe hintereinander angeordnet, ergibt sich die Motordrehzahl durch Multiplikation der Lastgeschwindigkeit mit den Wandlungsfaktoren aller Getriebe.
Beispiel:
Im oben dargestellten Bild sind ein Riementrieb und ein rotatorisches
Getriebe hintereinander geschaltet. Die Motordrehzahl ergibt sich damit
zu:
|
i
|
mit
|
n(t): | Motordrehzahl | ||||
|
n(t)
|
=
|
v(t)
|
*
|
|
v(t): | Geschwindigkeit der Last | |
|
u
|
u: | Umfang der Umlenkrolle des Riemens | |||||
| i: | Übersetzungsverhältnis des Getriebes |
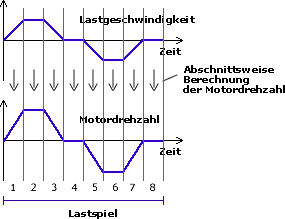
Die Ermittlung des Drehzahlverlaufs an der Motorwelle erfolgt durch abschnittsweise
Multiplikation der Lastgeschwindigkeit im Geschwindigkeits-Zeit-Diagramm
mit den entsprechenden Wandlungsfaktoren. Im Ergebnis entsteht der gewünschte
Verlauf der Motordrehzahl als Funktion der Zeit. Aus ihm können bereits
die maximale Drehzahl und die maximale Beschleunigung des Motors entnommen
werden. Sie sind wichtige Kriterien zur Auswahl eines geeigneten Motors.
|
|
|
|
Anzeigen
|
w-tech, Neumannstr. 29, D-90763 Fürth, Tel. +49 (0)911 73 99
715, Fax +49 (0)911 73 99 716, info@w-tech.de
Impressum