
|
|
|
Das Drehmoment, das der Motor an seiner Welle bereitstellt, hat zwei Funktionen. Es dient
 In
praktischen Anwendungen sind im allgemeinen mehrere mechanische Elemente
an den Bewegungsabläufen beteiligt und die Lastmomente werden an
verschiedenen Punkten des mechanischen Systems wirksam. Um die Komplexität
zu verringern, ist es zweckmäßig, das mechanische System in
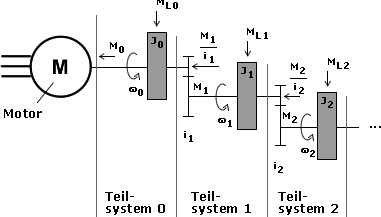
Teilsysteme zu zerlegen und jedes Teilsystem separat zu betrachten. Damit
ergibt sich das nebenstehende Modell für das mechanische System,
das an den Motor angekoppelt ist.
In
praktischen Anwendungen sind im allgemeinen mehrere mechanische Elemente
an den Bewegungsabläufen beteiligt und die Lastmomente werden an
verschiedenen Punkten des mechanischen Systems wirksam. Um die Komplexität
zu verringern, ist es zweckmäßig, das mechanische System in
Teilsysteme zu zerlegen und jedes Teilsystem separat zu betrachten. Damit
ergibt sich das nebenstehende Modell für das mechanische System,
das an den Motor angekoppelt ist.
Es ist durchaus möglich, dass ein Teilsystem nochmals in Untersysteme zerlegt werden muss.
Dabei sind:
| M0,1,2,... | Drehmoment am Antriebspunkt des Teilsystems. Dieses Drehmoment wird am vorgelagerten Teilsystem als zusätzliches Lastmoment wirksam |
| ML0,1,2,... | Lastmoment im Teilsystem |
| J0,1,2,... | Trägheitsmoment des Teilsystems |
| ω0,1,2,... | Winkelgeschwindigkeit des Teilsystems |
| i1,2,... | Übersetzungsverhältnis des Teilsystems |
Hinweis:
Im Trägheitsmoment J0 ist die Trägheit
des Motors nicht enthalten. Diese ist erst bekannt, wenn ein Motor ausgewählt
wurde. Es muss später in einer "Nachrechnung" berücksichtigt
werden.
Mit diesem Ansatz ergibt sich für das Drehmoment, das der Motor an seiner Welle bereitstellen muss, folgende Gleichung:
|
M0
|
=
|
Mb0
|
+
|
ML0
|
+
|
M1/i1
|
||
| Drehmoment, das der Motor an seiner Welle bereitstellen muss | Beschleunigungsmoment für die an der Motorwelle gekoppelte Trägheit | Lastmoment, das an der Motorwelle angreift | Drehmoment, das an das vorgelagerte mechanische Teilsystem übertragen wird | |||||
mit den Teilgleichungen:
|
Mb0
|
=
|
J0*(dω0/dt)
|
|
|
|||||
|
M1
|
=
|
J1*(dω1/dt)
|
+
|
ML1
|
+
|
M2/i2
|
|||
|
M2
|
=
|
J2*(dω2/dt)
|
+
|
ML2
|
+
|
M3/i3
|
|||
|
...
|
|||||||||
Das Drehmoment, das der Motor an seiner Welle bereitstellen muss, kann damit schrittweise beginnend mit dem letzten Teilsystem in der Wirkkette berechnet werden.
In der praktischen Anwendung kommt es drauf an, die Teilsysteme eindeutig zu erkennen und die wirksamen Übersetzungsfaktoren richtig zu ermitteln. Besonders bei der Wandlung linearer in rotatorische Bewegungen können die Zusammenhänge relativ komplex sein. Oft sind jedoch Vereinfachungen möglich, die die Berechnung erleichtern.
Bei den auftretenden Lastmomenten spielt die Reibung eine besondere Rolle.
Durch Reibung wird mechanische Energie in Wärme umgewandelt. Das
heißt, dass das Reibmoment innerhalb eines mechanischen Systems
immer in die gleiche Richtung wirkt wie die aktuelle Drehzahl bzw. Geschwindigkeit
im Teilsystem. Ändert sich innerhalb des Lastspiels die Drehrichtung,
ändert sich auch die Richtung des Reibmomentes.
In der Berechnung des erforderlichen Motordrehmomentes führt die
Reibung während des motorischen Betriebs (z.B. beim Beschleunigen)
zu einer Erhöhung und im generatorischen Betrieb (z.B. beim Bremsen)
zu einer Absenkung des erforderlichen Motordrehmomentes.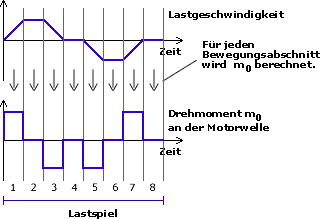
Für jeden Bewegungsabschnitt muss das Drehmoment m0 berechnet werden. Dieser Vorgang ist je nach Anzahl und Komplexität der Teilsysteme mit einem gewissen Aufwand verbunden. Das ist insbesondere dann der Fall, wenn die auftretenden Lastmomente nicht konstant sondern zeitlich veränderlich sind oder von der augenblicklichen Geschwindigkeit bzw. Drehzahl abhängen. Die mechanische Reibung, die in vielen Anwendungen nicht vernachlässigt werden kann, stellt ein solches veränderliches Lastmoment dar.
Nach der Berechnung und Addition aller Teildrehmomente in allen Bewegungsabschnitten liegt das nebenstehende Diagramm vor. Aus ihm kann der zeitliche Verlauf des vom Motor bereitzustellenden Drehmomentes m0 abgelesen werden. Gemeinsam mit dem Drehzahlverlauf an der Motorwelle liefert es die benötigten Kennwerte zur Auswahl des Motors.
|
|
|
|
Anzeigen
|
w-tech, Neumannstr. 29, D-90763 Fürth, Tel. +49 (0)911 73 99
715, Fax +49 (0)911 73 99 716, info@w-tech.de
Impressum