
|
|
|
Der Resolver ist ein rotatorischer Lagegeber. Innerhalb einer Polteilung liefert er ein absolutes Lagesignal. Der Resolver arbeitet induktiv und kommt im Geber selbst ohne elektronische Bauelemente aus. Resolver sind deshalb robust und kostengünstig.
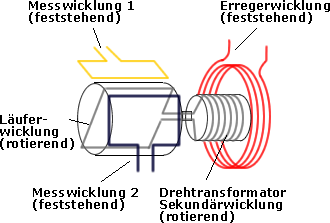 Die
Erregerwicklung wird mit einem hochfrequenten Erregersignal (2 kHz
bis 10 kHz), das in der Auswerteelektronik gebildet wird, beaufschlagt.
Über einen Drehtransformator wird dieses Signal auf den rotierenden
Teil des Resolvers, der mit der Motorwelle verbunden ist, übertragen.
Die Sekundärwicklung des Drehtransformators speist die kurzgeschlossene
Läuferwicklung. In der Läuferwicklung fließt ein Kurzschlussstrom
mit der gleichen Frequenz wie das Erregersignal.
Die
Erregerwicklung wird mit einem hochfrequenten Erregersignal (2 kHz
bis 10 kHz), das in der Auswerteelektronik gebildet wird, beaufschlagt.
Über einen Drehtransformator wird dieses Signal auf den rotierenden
Teil des Resolvers, der mit der Motorwelle verbunden ist, übertragen.
Die Sekundärwicklung des Drehtransformators speist die kurzgeschlossene
Läuferwicklung. In der Läuferwicklung fließt ein Kurzschlussstrom
mit der gleichen Frequenz wie das Erregersignal.
Der Kurzschlussstrom ruft ein pulsierendes Magnetfeld hervor. Dieses
Magnetfeld durchsetzt auch die Messwicklungen 1 und 2, die im Ständer
des Resolvers angeordnet sind. Das pulsierende Magnetfeld induziert
in den Messwicklungen elektrische Spannungen, die von der Auswerteelektronik
erfasst werden. Die gemessenen Spannungen pulsieren mit der gleichen
Frequenz und Phasenlage wie das Erregersignal. Ihre Amplituden sind
jedoch von der Stellung der Läuferwicklung abhängig. Stehen
Läufer- und Messwicklung parallel, durchsetzt das Magnetfeld
des Läufers die Messspule vollständig und die induzierte
Spannung ist maximal. Stehen Läuferwicklung und Messwicklung
im rechten Winkel zueinander, wird in der Messspule keine Spannung
induziert.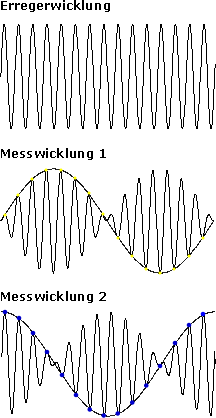
Die Amplitude der induzierten Spannung verläuft damit als Sinusfunktion
in Abhängigkeit von der Lage der Läuferwicklung. Da eine einzelne
Sinusfunktion keinen eindeutigen Rückschluss auf die aktuelle Lage
zulässt, wird zusätzlich eine zweite, um 90° versetzt angeordnete
Messspule verwendet. Sie liefert eine Cosinusfunktion in Abhängigkeit
von der Lage der Läuferwicklung. Die Auswertung beider Signale ermöglicht
eine eindeutige Berechnung der aktuellen Lage.
An den Messwicklungen 1 und 2 wird ein Signal bereitgestellt, das das Erregersignal mit einer überlagerten Hüllkurve enthält. Die eigentliche Lageinformation liegt in der Hüllkurve. Diese muss aus den Messsignalen extrahiert werden. Dazu wird das Messsignal von der Auswerteelektronik mit einem Analog-Digital-Wandler immer genau dann abgetastet, wenn das Erregersignal sein Maximum erreicht. Da das Erregersignal in der Auswerteelektronik gebildet wird, sind die erforderlichen Abtastzeitpunkte exakt bekannt. Die Auswertelektronik erfasst damit lediglich die Scheitelwerte der Messsignale und eliminiert auf diese Weise das Erregersignal. Übrig bleiben sinus- bzw. cosinusförmige Signalverläufe, die die eigentliche Lageinformation enthalten. Über die Gleichung
alpha = arctan(Messsignal 1 / Messsignal 2)
lässt sich der Lagewinkel alpha berechnen. Diese Aufgabe übernimmt im allgemeinen die Software des Stellgerätes.
Resolver können mit mehr als einem Polpaar ausgeführt
werden. Ist letzteres der Fall besteht die Läuferwicklung aus mehreren
in Reihe geschalteten Einzelwicklungen, die um eine feste Schrittweite
gegeneinander verdreht angeordnet sind. Bei einer mechanischen Umdrehung
durchläuft der gemessene Winkel dann mehrfach den Bereich von 0°
bis 360°.
Dient der Resolver zur Erfassung der Läuferlage an einem Synchronmotor,
hat er entweder die Polpaarzahl 1 oder die gleiche Polpaarzahl wie der
Synchronmotor. Nur unter dieser Bedingung kann die Lage des Magnetfeldes
im Synchronmotor eindeutig bestimmt und der Strom optimal in die Ständerwicklungen
des Motors eingeprägt werden.
|
|
|
|
Anzeigen
|
w-tech, Neumannstr. 29, D-90763 Fürth, Tel. +49 (0)911 73 99
715, Fax +49 (0)911 73 99 716, info@w-tech.de
Impressum