
|
|
|
| Lastmoment | bis 5 Nm |
| Drehzahl | bis 5 000 U/min |
Die Wicklungen des Schrittmotors sind im Ständer angeordnet. Bei bipolarer Speisung (Stromfluss in beide Richtungen) werden 2 Wicklungen, bei unipolarer Speisung (Stromfluss nur in eine Richtung) werden 4 Wicklungen verwendet.
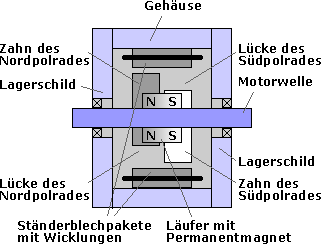 Konstruktiv
sind die Ständerwicklungen in einem genuteten Blechpaket untergebracht.
Das Blechpaket ist so ausgeformt, dass Polschuhe entstehen.
Konstruktiv
sind die Ständerwicklungen in einem genuteten Blechpaket untergebracht.
Das Blechpaket ist so ausgeformt, dass Polschuhe entstehen.
Der Läufer enthält einen Permanentmagneten mit
axialer Magnetisierung. Das heißt, der Nordpol befindet sich an
einem Ende und der Südpol am anderen Ende das Läufers.
An den Enden des Läufers sind Polkappen angebracht. Aufgrund der
Magnetisierung trägt eine Seite des Läufers die Nordpolkappen
und die anderes Seite die Südpolkappen. Die Kappen an Nord- und Südpol
sind gegeneinander um eine halbe Polteilung versetzt (verdreht). Die Anzahl
der Kappen definiert die Anzahl der Winkelschritte je Umdrehung.
Die Motorwelle des Schrittmotors ist im allgemeinen beidseitig zugänglich um weitere Antriebselemente wie Getriebe, Bremsen und Lagegeber montieren zu können.
Lagegeber werden dann verwendet, wenn ein möglicher Schrittverlust aufgrund einer Überlastung des Motors erkannt und vom Steuergerät gemeldet werden soll.
|
|
|
|
Anzeigen
|
w-tech, Neumannstr. 29, D-90763 Fürth, Tel. +49 (0)911 73 99
715, Fax +49 (0)911 73 99 716, info@w-tech.de
Impressum