Experimentieren Sie mit virtuellen Testständen im:

Legen Sie Antriebe aus mit:

Der Synchronmotor
Der Synchronmotor ist dem bürstenlosen Gleichstrommotor
sehr ähnlich. Der größte Unterschied zwischen beiden liegt
in der Art der Ströme, die vom Steuergerät in die Ständerwicklungen
eingeprägt werden. Beim bürstenlosen Gleichstrommotor werden
die Wicklungen zyklisch mit positiven und negativen Stromblöcken
beaufschlagt. Beim Synchronmotor hingegen fließen in den Wicklungen
sinusförmige Ströme.
 Funktionsprinzip
Funktionsprinzip
Der Synchronmotor weist den gleichen Aufbau wie der bürstenlose
Gleichstrommotor auf. Die Wicklungen sind im Ständer angeordnet.
Der Läufer ist mit Permanentmagneten versehen.
Größere Synchronmotoren verfügen anstelle der Permanentmagnete
über eine Erregerwicklung im Läufer, die das erforderliche Magnetfeld
erzeugt. Da diese Motoren in der Servotechnik keine Rolle spielen, werden
sie nicht weiter betrachtet.
In der Animation wird ein Ständer mit einem 3-phasigen Wicklungssystem
verwendet. Zur Vereinfachung ist anstelle des Läufers ein einfacher
Permanentmagnet gezeichnet.
Fließt in den Wicklungen ein sinusförmiger
elektrischer Strom und besteht zwischen den Strömen in den Wicklungen
eine Phasenverschiebung von 120°, bildet sich im Ständer des
Motors ein rotierendes Magnetfeld heraus. Dieses Magnetfeld durchsetzt
auch die Permanentmagneten des Läufers. In Folge wirkt auf den Läufer
ein Drehmoment. Der Läufer reagiert, führt eine Drehbewegung
aus und folgt der Rotation des Magnetfeldes.
Das auf den Läufer wirkende Drehmoment ist dann am
größten, wenn die magnetischen Pole des Läufers im rechten
Winkel zum Magnetfeld des Ständers stehen. Deshalb wird die Position
des Läufers mit einem Lagegeber erfasst und an das Stellgerät
übertragen. Dieses prägt die Ströme so in die Wicklungen
des Ständers so ein, dass zwischen Läufer und dem Magnetfeld des
Ständers immer der optimale Winkel von 90° eingehalten wird.
Über die Stromamplitude verändert des Stellgerät die Stärke
des Drehmomentes.
Für die Lageerfassung werden hoch auflösende
Gebersysteme wie z. B. Resolver oder optische Geber eingesetzt, da deren
Lageinformation gleichzeitig als Istwert für einen Lageregler verwendet
werden kann. Die separate Erfassung von Kommutierungszeitpunkt und Lage
durch zwei getrennte Messsysteme, wie sie bei bürstenlosen Gleichstrommotoren
üblich ist, entfällt damit.
Mechanische Drehzahl und Polpaare
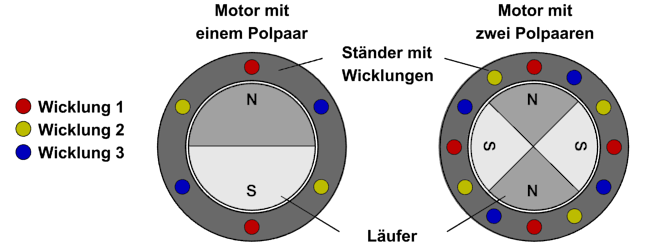
Wird das 3-phasige Wicklungssystem in der oben gezeigten
Animation von Strömen durchflossen, bildet sich im Motor ein Magnetfeld
mit einem Nord- und einem Südpol heraus. Der Motor weist ein so genanntes
Polpaar auf und hat die Polpaarzahl 1. Die Polpaarzahl ist damit eine
durch die Motorkonstruktion festgelegte Größe.
Durch mehrfache Anordnung des 3-phasigen Wicklungssystems und Reihenschaltung
der entsprechenden Phasen entstehen Motoren mit mehr als einem Polpaar.
Im Bild ist beispielhaft eine Anordnung mit 2 Polpaaren dargestellt. Sind
die Wicklungen in dieser Anordnung stromdurchflossen, entstehen über
den Umfang des Ständers verteilt 2 Nord- und 2 Südpole. Der
Motor hat die Polpaarzahl 2.
Durchwandert der Strom in den Ständerwicklungen eine volle zeitliche
Periode, dreht sich das Magnetfeld des Ständers um eine volle Polteilung
(1 Nord- und 1 Südpol) weiter. Bei 2 Polpaaren im Ständer
entspricht das einer mechanischen Drehung von 180°. Die Rotationsgeschwindigkeit
des Ständerfeldes ist gegenüber der im Motor mit einem Polpaar
auf die Hälfte abgesunken, obwohl sich die Frequenz des speisenden
Stromes nicht geändert hat.
Die Polpaarzahl des Motors hat Einfluss auf die Drehfrequenz des Magnetfeldes
und damit auf die Drehzahl bzw. Drehfrequenz des Läufers, der dem
Magnetfeld folgt. Sie sinkt mit steigender Polpaarzahl.
Es gilt:
Mechanische Drehfrequenz = Frequenz des speisenden Stromes/Polpaarzahl
Üblich sind Motoren mit 1 bis 4 Polpaaren.
