
|
|
|
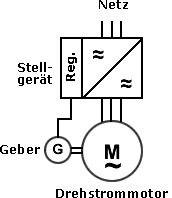 Stellgeräte
für Drehstrommotoren wandeln die Wechselspannung des speisenden
elektrischen Netzes in eine Wechselspannung mit veränderlicher
Frequenz und Amplitude um. Frequenz und Amplitude der bereitgestellten
Wechselspannung dienen als Stellgrößen für die angeschlossenen
Drehstrommotoren. Dabei ist es unerheblich, ob es sich um Synchron-
oder Asynchronmotoren handelt.
Stellgeräte
für Drehstrommotoren wandeln die Wechselspannung des speisenden
elektrischen Netzes in eine Wechselspannung mit veränderlicher
Frequenz und Amplitude um. Frequenz und Amplitude der bereitgestellten
Wechselspannung dienen als Stellgrößen für die angeschlossenen
Drehstrommotoren. Dabei ist es unerheblich, ob es sich um Synchron-
oder Asynchronmotoren handelt.
Bürstenlose Gleichstrommotoren sind, sofern sie 3-phasig ausgeführt
werden, Synchronmotoren sehr ähnlich. Folglich gibt es zwischen den
Stellgeräten für Drehstrommotoren und bürstenlosen Gleichstrommotoren
keine grundsätzlichen Unterschiede. Sie werden deshalb gemeinsam
behandelt.
Stellgeräte für Drehstrommotoren und bürstenlose Gleichstrommotoren werden bei Servoanwendungen nahezu ausschließlich als Pulsteller realisiert.
 Drehstrommotoren
sind dreiphasig aufgebaut. Sie sind in ihrem elektrischen Verhalten
deshalb komplexer und schwieriger zu beschreiben als Gleichstrommotoren.
Aus diesem Grund werden einige Vereinfachungen vorgenommen:
Drehstrommotoren
sind dreiphasig aufgebaut. Sie sind in ihrem elektrischen Verhalten
deshalb komplexer und schwieriger zu beschreiben als Gleichstrommotoren.
Aus diesem Grund werden einige Vereinfachungen vorgenommen:
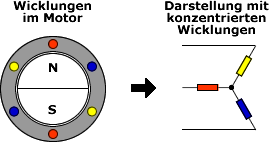
 Zur
Verdeutlichung der Strom- und Spannungsverläufe hat sich bei
Drehstrommotoren die Raumzeigerdarstellung bewährt. Dazu wird
über die schematische Darstellung der Motorwicklungen ein Koordinatensystem
gelegt. Die Ströme und Spannungen der einzelnen Wicklungen werden
als Vektoren betrachtet, deren Achsen mit denen der zugeordneten Wicklungen
übereinstimmen. Die Richtungen der Vektoren ergeben sich aus
dem Vorzeichen der wirksamen Ströme und Spannungen, die Längen
der Vektoren ergeben sich aus den Beträgen der wirksamen Ströme
und Spannungen. Jeder Wicklung wird damit ein Vektor zugeordnet, der
seine Größe und seine Richtung entsprechend dem zeitlichen
Verlauf des Phasenstromes oder der Phasenspannung ändert. Diese
Vektoren erwecken den Anschein, als ob sie "pulsieren".
Zur
Verdeutlichung der Strom- und Spannungsverläufe hat sich bei
Drehstrommotoren die Raumzeigerdarstellung bewährt. Dazu wird
über die schematische Darstellung der Motorwicklungen ein Koordinatensystem
gelegt. Die Ströme und Spannungen der einzelnen Wicklungen werden
als Vektoren betrachtet, deren Achsen mit denen der zugeordneten Wicklungen
übereinstimmen. Die Richtungen der Vektoren ergeben sich aus
dem Vorzeichen der wirksamen Ströme und Spannungen, die Längen
der Vektoren ergeben sich aus den Beträgen der wirksamen Ströme
und Spannungen. Jeder Wicklung wird damit ein Vektor zugeordnet, der
seine Größe und seine Richtung entsprechend dem zeitlichen
Verlauf des Phasenstromes oder der Phasenspannung ändert. Diese
Vektoren erwecken den Anschein, als ob sie "pulsieren".
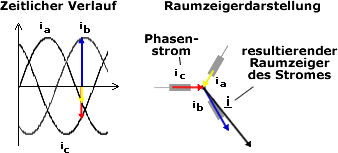
Die Strom- und Spannungsvektoren der einzelnen Wicklungen
werden zu einem resultierenden Vektor, dem so genannten Raumzeiger durch
vektorielle Addition zusammengefaßt. Diese Raumzeiger beschreibt
den augenblicklichen Zustand des Motors hinsichtlich der physikalischen
Größen Strom und Spannung. Im Gegensatz zu den Vektoren der
einzelnen Phasen "pulsiert" er nicht sondern führt eine
Bewegung aus. Zum Beispiel rotiert der resultierende Raumzeiger bei ideal
sinusförmigen Phasengrößen mit einer konstanten Geschwindigkeit.
Für magnetische Größen, wie zum Beispiel die Flußverkettung,
wird die Raumzeigerdarstellung in gleicher Weise angewendet. Drehstrommotoren
sind damit vollständig durch Raumzeiger zu beschreiben. Da bürstenlose
Gleichspannungsmotoren vom Aufbau her den Drehstrommotoren sehr ähnlich
sind, kann die vektorielle Beschreibung im Grundsatz auch auf sie angewendet
werden.
Hinweis: Aufgrund der vektoriellen (geometrischen) Addition der Phasenströme bzw. der Phasenspannungen heben sich diese nicht auf, wie es bei der skalaren Addition der Fall ist. Bei der skalaren Addition ergibt die Summe der Ströme Null.
Die Entstehung der Zwischenkreisspannung, die als Eingangsgröße für den Pulssteller dient, wurde bereits beschrieben. Die folgenden Ausführungen beschränken sich deshalb auf den Pulssteller.
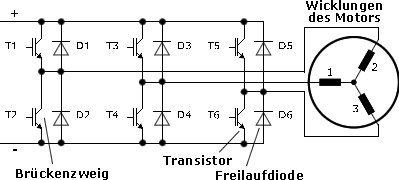 Der
Pulssteller wandelt die Zwischenkreisspannung in eine 3-phasige pulsierende
Ausgangsspannung um. Er besteht aus 6 Transistoren und 6 Freilaufdioden.
Jeweils zwei Transistoren sind in Reihe geschaltet. Parallel zu jedem
Transistor ist eine Freilaufdiode angeordnet. Sie weist jeweils die
entgegengesetzte Stromflussrichtung des zugehörigen Transistors
auf.
Der
Pulssteller wandelt die Zwischenkreisspannung in eine 3-phasige pulsierende
Ausgangsspannung um. Er besteht aus 6 Transistoren und 6 Freilaufdioden.
Jeweils zwei Transistoren sind in Reihe geschaltet. Parallel zu jedem
Transistor ist eine Freilaufdiode angeordnet. Sie weist jeweils die
entgegengesetzte Stromflussrichtung des zugehörigen Transistors
auf.
Jeweils 2 Transistoren und 2 Dioden bilden einen Brückenzweig. An
jedem Brückenzweig ist eine Phase des Drehstrommotors oder des bürstenlosen
Gleichstrommotors angeschlossen.
Die Transistoren werden so angesteuert, dass in jedem Brückenzweig
entweder der obere oder der untere Transistor leitend ist. Der Schaltzustand
der Brückenzweige wird deshalb entweder mit einer logischen 1
oder einer logischen 0 beschrieben. 1 bedeutet, dass der obere Transistor
angesteuert ist. 0 bedeutet, dass der untere Transistor angesteuert
ist.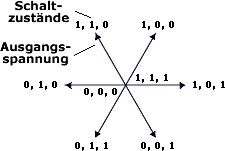
Je nach Schaltzustand der einzelnen Brückenzweige liegt an den
Wicklungen des Motors entweder der positive oder der negative Pol der
Zwischenkreisspannung an. Die wirksame "Summenspannung" ergibt
sich aus der Überlagerung der einzelnen an den Wicklungen anliegenden
Spannungen. Sie wird zweckmäßigerweise als Raumzeiger dargestellt.
Betrachtet man alle möglichen Schaltzustände des Pulsstellers
und stellt die resultierenden Raumzeiger der Ausgangsspannung dar, ergibt
sich nebenstehendes Bild. Man erkennt, dass der Pulssteller
realisieren kann. Andere Spannungen können vom Pulssteller nicht
erzeugt werden. Da diese für den geregelten Betrieb des Motors jedoch
erforderlich sind, müssen sie als Mittelwert aus den erzeugbaren
Spannungen gebildet werden. Der Pulssteller generiert deshalb eine Folge
von Spannungsraumzeigern, die im Mittelwert über einen bestimmten
Zeitraum betrachtet die gewünschte Sollspannung ergeben.
Der Betrag der aktiven Spannungsraumzeiger wird über ihre Einschaltdauer
und damit die "Breite" des Spannungsimpulses gesteuert. Pulssteller
für Drehstrommotoren arbeiten damit ebenfalls mit Pulsbreitenmodulation.
|
|
|
|
Anzeigen
|
w-tech, Neumannstr. 29, D-90763 Fürth, Tel. +49 (0)911 73 99
715, Fax +49 (0)911 73 99 716, info@w-tech.de
Impressum